Thrust-Assisted Biped Robot
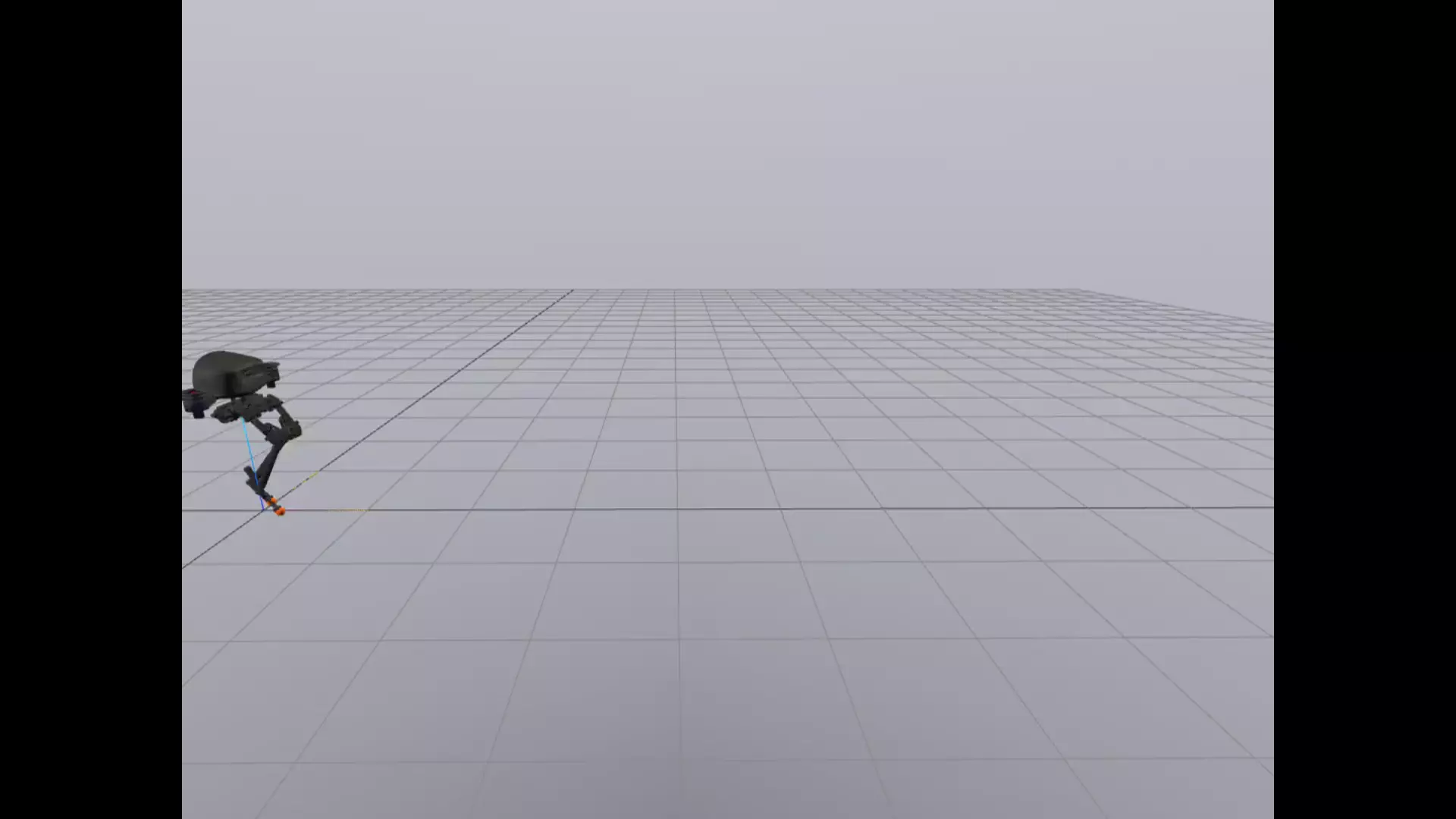
Locomotion implementation for a biped robot with thrust assistance.
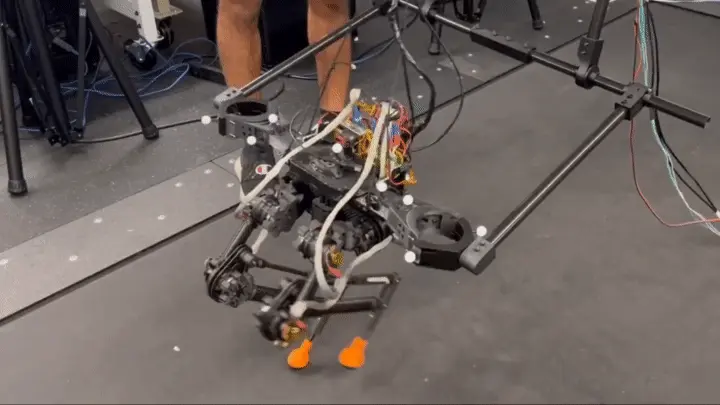
My introduction to bipedal locomotion research began with developing control strategies for a thrust-assisted bipedal robot, specifically the Harpy platform.
My first objective was to achieve planar walking on hardware, which I pursued by implementing linear inverted pendulum (LIP) walking without relying on thrust assistance. I developed a custom C++ controller and deployed it on a real-time Linux system, and I programmed the ELMO motor controllers to drive the leg actuators using PD control. The ELMO motor control code is available here.

I became interested in applying contact-implicit MPC to thrust-assisted bipedal locomotion, which motivated preliminary investigations into walking and jumping with thrust assistance.